モーターの可動範囲の確認
最初にservo.pyを実行すると、 data フォルダに arm.json が作成されます。
python servo.py
data/arm.json is created.
arm.json をテキストエディタで開き、Raspberry Pi Picoの COM の番号を設定します。
{
"COM": "COM?",
"camera-index": 0
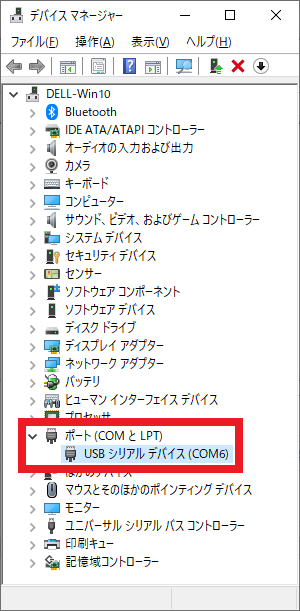
COM の番号はデバイスマネージャーを見るとわかります。
COM の番号を設定してから、再度servo.pyを実行します。
python servo.py
|
|
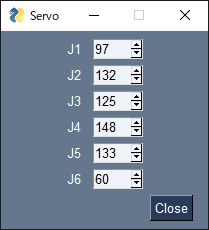
テキストボックスに数値を入れてエンターキーを入力すると、指定した軸のモーターが回転します。
モーターの多くは0°から180°まで回転します。
ロボットアームを組み立てる前に、可動範囲の中央にモーターを回転させておきます。
組み立てをするときは、アームが可動範囲を中心に動作するように気をつけてください。