アームの角度の調整
angle.pyを実行するとアームの角度の調整のアプリが起動します。
python angle.py
※ パソコンに複数のカメラが接続されている場合は、 data\arm.json の camera-index の値を変更してください。
サーボモーターへの角度の指令値とアームの角度との対応付けをします。
以下の写真ではJ2, J3, J4のアームの角度は0度です。
|
|
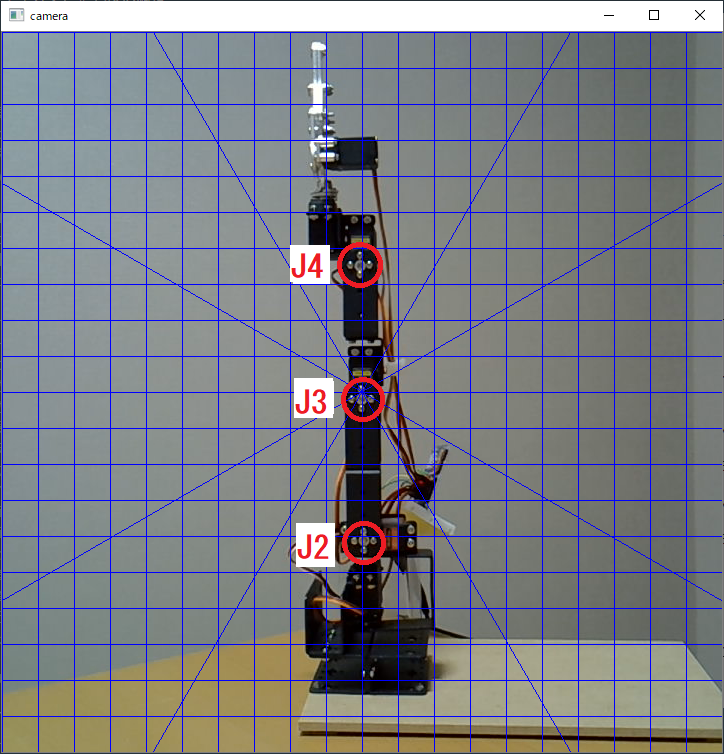
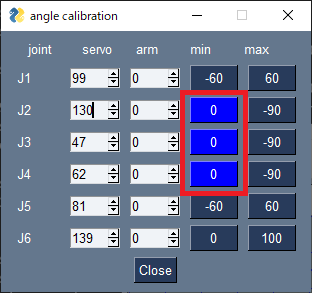
0ボタンをクリックして、0度の時のサーボモーターの角度を記憶しておきます。
以下の写真ではJ2のアームの角度は-90度です。
|
|
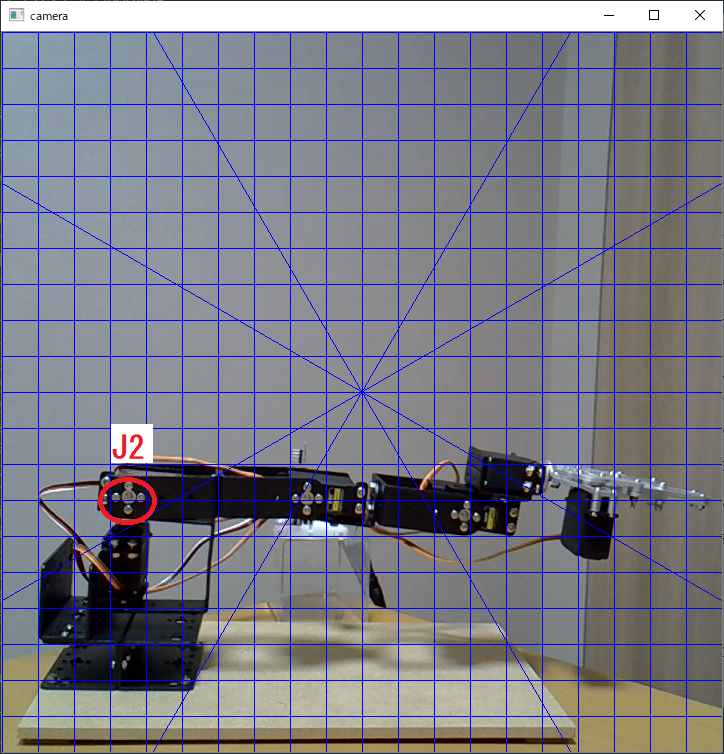
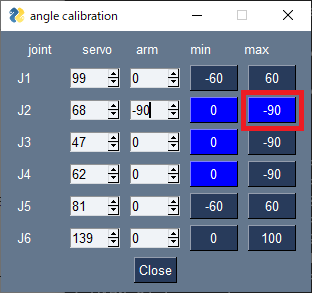
-90ボタンをクリックして、-90度の時のサーボモーターの角度を記憶しておきます。
基準となるアームの角度でのサーボモーターの角度を対応付けをさせます。
以下の写真ではJ3のアームの角度は-90度なので、-90ボタンをクリックしてサーボモーターの角度を記憶します。
|
|


以下の写真ではJ4のアームの角度は-90度なので、同様に-90ボタンをクリックしてサーボモーターの角度を記憶します。
|
|


以下の写真ではJ1のアームの角度は-60度なので、-60ボタンをクリックします。
|
|


以下の写真ではJ1のアームの角度は60度なので、60ボタンをクリックします。
|
|


J5の回転は真上から見にくいので、写真のようにハンドの先にペンのように細長いものをテープで貼り付けておくと、角度が見やすいです。
手前方向がJ5=0度の向きで、ペンは0度の矢印と垂直になっているので注意してください。

以下の写真ではJ5のアームの角度は-60度なので、-60ボタンをクリックします。
|
|


以下の写真ではJ5のアームの角度は60度なので、60ボタンをクリックします。
|
|


J6の場合はハンドの開度を指定します。
開度の範囲は0~100です。
以下の写真ではハンドは閉じているので、0ボタンをクリックします。
|
|


以下の写真ではハンドは最も開いているので、100ボタンをクリックします。
|
|

