カメラ キャリブレーション
ChArUcoボードとArUcoマーカーの印刷
print.pyを実行すると data\marker フォルダに、 ChArUcoボード と ArUcoマーカー の画像ファイルが作成されます。
python print.py
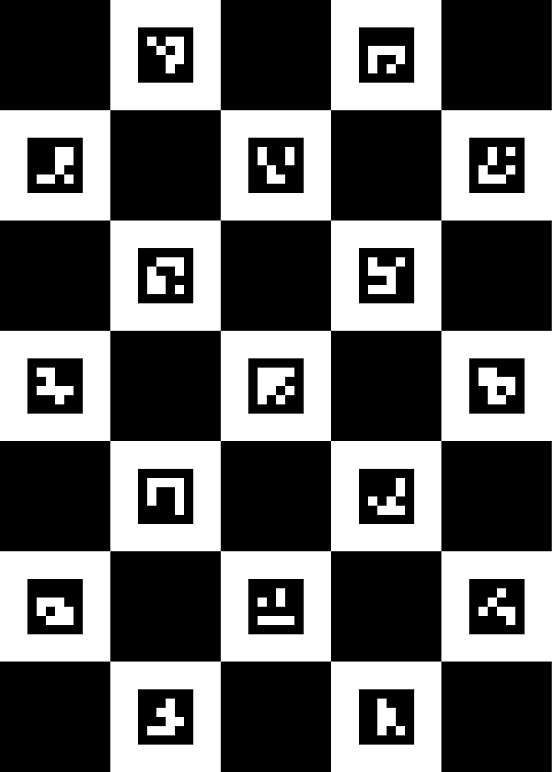
ChArUcoボード |
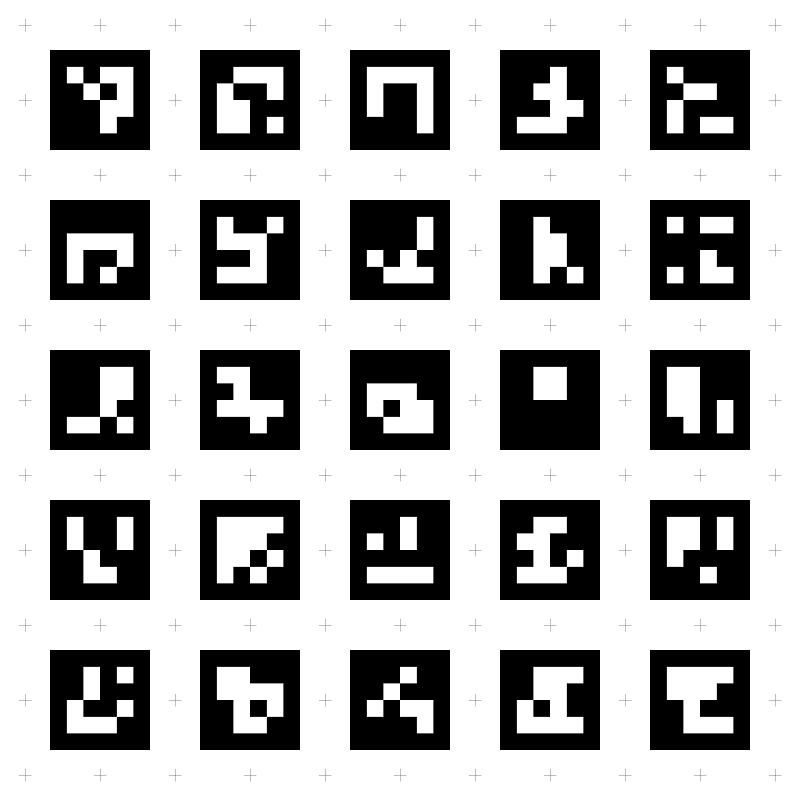
ArUcoマーカー |
|---|---|
board4x4.png |
markers4x4.png |
|
|
※ data\marker フォルダの marker.pdf ファイルに、同じ画像が入っているので、このPDFファイルを使ってもかまいません。
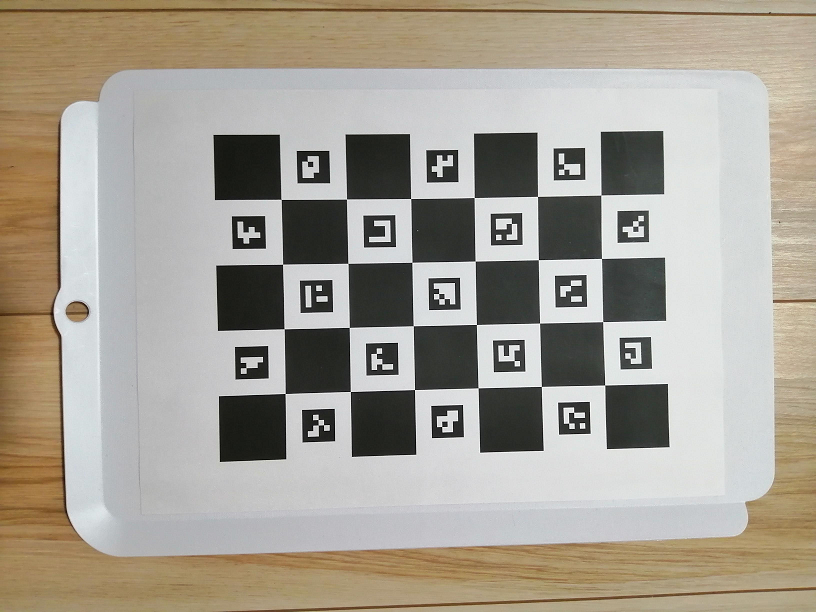
カメラ キャリブレーションではChArUcoボードを印刷して適当な板に貼り付けます。
カメラ キャリブレーション
board.py でキャリブレーションを実行します。
python board.py
ChArUcoボードを様々な角度に傾けてカメラで撮影してください。
|
|
全部で50枚の画像を撮影し、撮影が終わったらキャリブレーションの計算をします。
計算には数10秒かかります。