逆運動学
逆運動学は、手先の位置と姿勢(角度)から軸の角度を求めます。
\[\newcommand\v[1]{\boldsymbol{#1}}
\newcommand\r[1]{\mathrm{#1}}\]
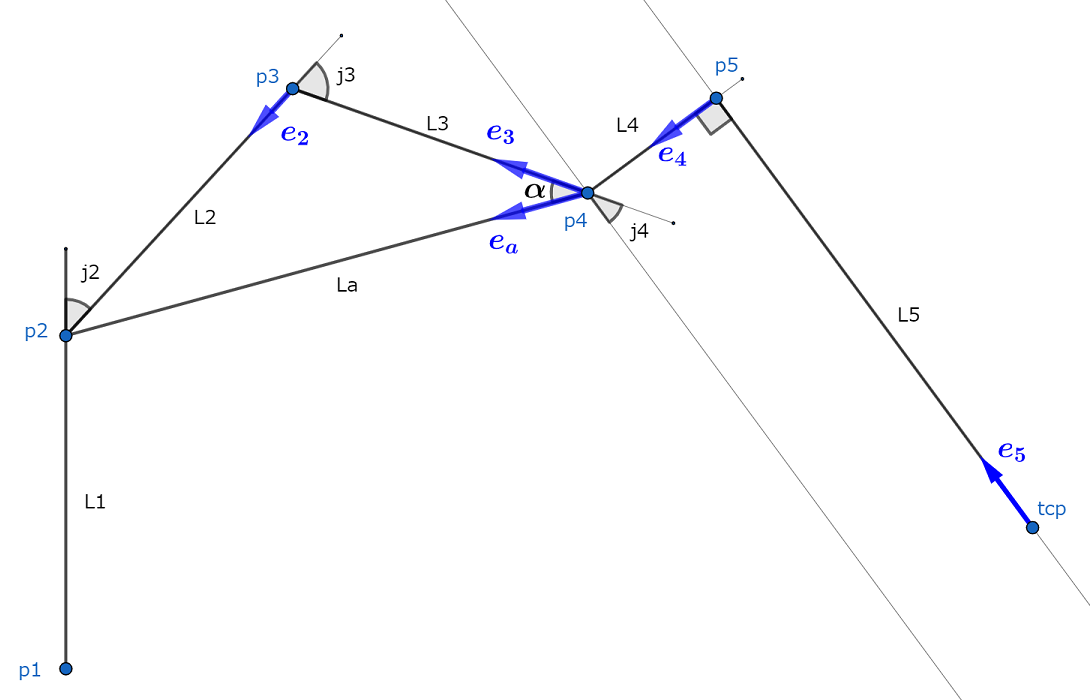
tcpからp5に向かう単位ベクトル \(\v{e_5}\) は
\[\begin{split}\begin{flalign}
& \theta_2 = \pi - \theta
\\
& \v{e_5} = (\cos \theta_2, \sin \theta_2)
\end{flalign}\end{split}\]
p5の位置は
\[p5 = tcp + L5 \cdot \v{e_5}\]
p5からp4に向かう単位ベクトル \(\v{e_4}\) は
\[\v{e_4} = \r{rot}(\v{e_5}, \frac{\pi}{2})\]
p4の位置は
\[p4 = p5 + L4 \cdot \v{e_4}\]
p4とp2の距離を \(L_a\) とします。
\[L_a = \| p4 - p2 \|\]
三角形p2, p3, p4で、p4の角度を \(\alpha\) とすると、余弦定理から
\[\cos \alpha = \frac{L3^2 + L_a^2 - L2^2}{2 \cdot L3 \cdot L_a}\]
\(cos\) の逆関数 \(\arccos\) を使い
\[\alpha = \arccos (\cos \alpha)\]
p4からp2に向かう単位ベクトルを \(\v{e_a}\) とすると
\[\v{e_a} = \r{unit}(p2 - p4)\]
p4からp3に向かう単位ベクトル \(\v{e_3}\) は
\[\v{e_3} = \r{rot}(\v{e_a}, - \alpha)\]
p3の位置は
\[p3 = p4 + L3 \cdot \v{e_3}\]
p2, p3, p4, p5, tcpのすべての位置が分かったので、それぞれの軸の角度は容易に計算できます。
\[j1 = \arctan \frac{y}{x}\]
\[j2 = \arctan(p3 - p2) - \frac{\pi}{2}\]
\[j3 = \arctan(p4 - p3) - \arctan(p3 - p2)\]
\[j4 = \arctan(tcp - p5) - \arctan(p4 - p3)\]
\[j5 = \phi\]